Robotplattformar
Gemensamt
Alla robotar inkluderar batterier och kraftelektronik. Alla kan kraftsätta ett virkort och en raspberry. Alla styrs m.h.a. TTL-signaler.
De flesta robotar styrs av DIR+PWM-signal. DIR säger åt vilket håll styrningen går. PWM är en periodisk signal, som är '1' ibland, och '0' ibland. Den s.k. duty-cykeln säger hur stor andel av PWM-signalen som är hög, och räknas i %. Denna berättar hur snabbt roboten kör. DIR-signalen läses typiskt bara av när PWM-signalen har en fallande flank. Att därför ha 100% duty-cykel innebär att man inte kan ändra riktning.
En del robotar har delar som styrs via servosignal. Applicera en PWM-signal med periodtiden 20 ms. Signalvärdet står i att PWM:en har en '1'-tid på 1-2 ms. Ibland står 1 ms för max åt ena hållet, och 2 ms för max åt andra hållet, och 1.5 ms för neutral. Ibland står 1 ms för "inget", och 2 ms för "max".
Alla robotar har plats för virkort, där man kopplar upp de kretsar som behövs. Läs vidare längst ner på sidan.
Virkort och raspberry kan drivas via batterieliminatorer, men för att roboten ska förflytta sig krävs batteri.
 Våra batterier är laddbara NiMH-batterier, som man kopplar in via en svart-röd sladd i robotarna.
Våra batterier är laddbara NiMH-batterier, som man kopplar in via en svart-röd sladd i robotarna.
Sumo/Terminator
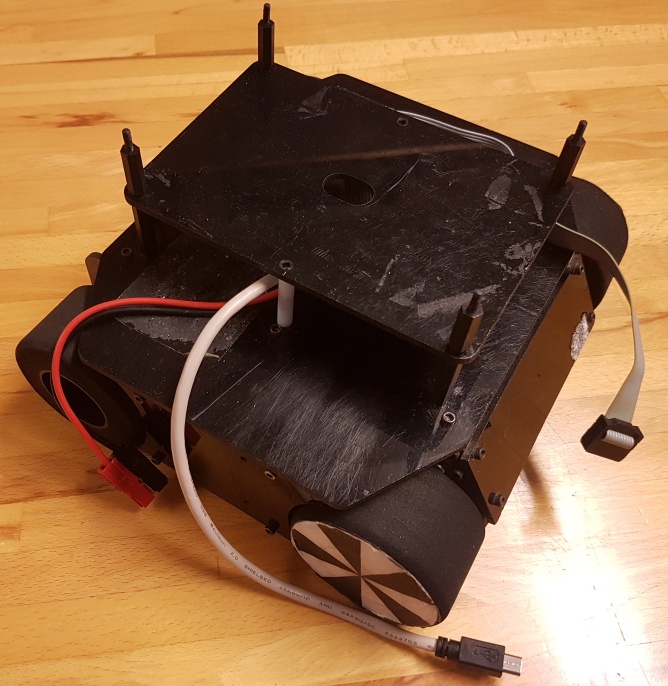
Sumo (även kallad Terminator) är en liten kompakt svart fyrhjuling som används till t.ex. eftersök, labyrint och linjeföljare. Den körs genom att styra höger och vänster hjulpar separat. Varje hjulpar styrs med en DIR+PWM-signal. Tophastighet är ca 1 m/s. Det finns plats för en stack av virkort/raspberry på den.
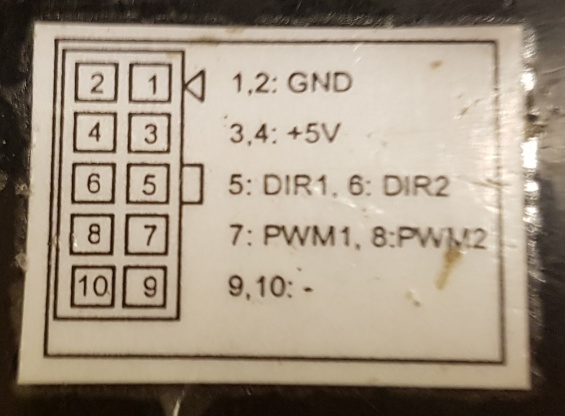
Från drivelektroniken kommer en micro-USB-sladd för att kraftsätta en raspberry PI, samt en 10-pinnars IDC-kontakt (se bild). IDC-kontakten används för att kraftsätta virkort, samt för styrning, och bör kopplas in i kontakt 1 (stående 10-pinnars) på virkortet.
Databladet.Vid behov så kan roboten utrustas med odometer (mäter hjulrotation för att på så sätt räkna ut förflyttning, se sidan Sensorer/Odometer), och tejpsensormodul (se sidan Sensorer/Reflektion). Ytterligare sensorer kan monteras.
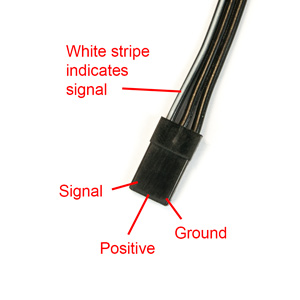
En gripklo kan monteras på roboten. Den kommer då drivas av ett servo, t.ex. HS-55, med en servosignal enligt beskrivningen ovan. Bild på kontaktdon.
{kind=link}
Lagerrobot
Lagerroboten är en ganska stor historia. Kraftsättning och styrning fungerar likadant som på Terminator, men med en aningen lägre tophastighet, knappt 1 m/s. Det finns plats för två stackar av virkort/raspberry på den.
Lagerroboten kan ha en eller två tejpsensormoduler (se sidan Sensorer/Reflektion).
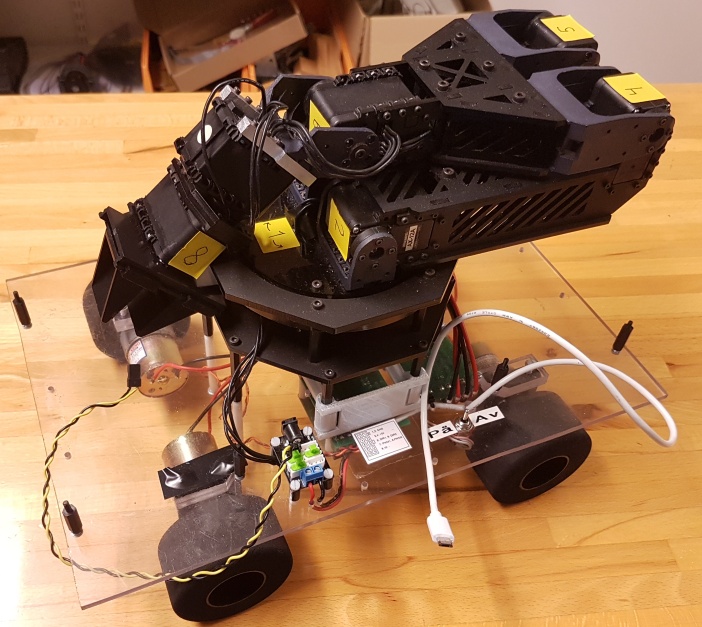
Lagerroboten har dessutom en arm av typen Trossenrobotics Reactor. Armen får liv med ett antal servon av typen AX-12A. Man styr dessa AX12 via ett UART-gränssnitt med 1 Mbaud och ett ganska komplext, men väldokumenterat, protokoll.
- Trossenrobotics Reactor, Getting started, Robotarm (vi har den med Wrist Rotate).
- AX-12A Datablad som PDF.
- AX-12A, dokumentationssida.
- Protocol 1, kommunikationsgränssnittet (används av flera servon).
Taxi/tävlingsbil
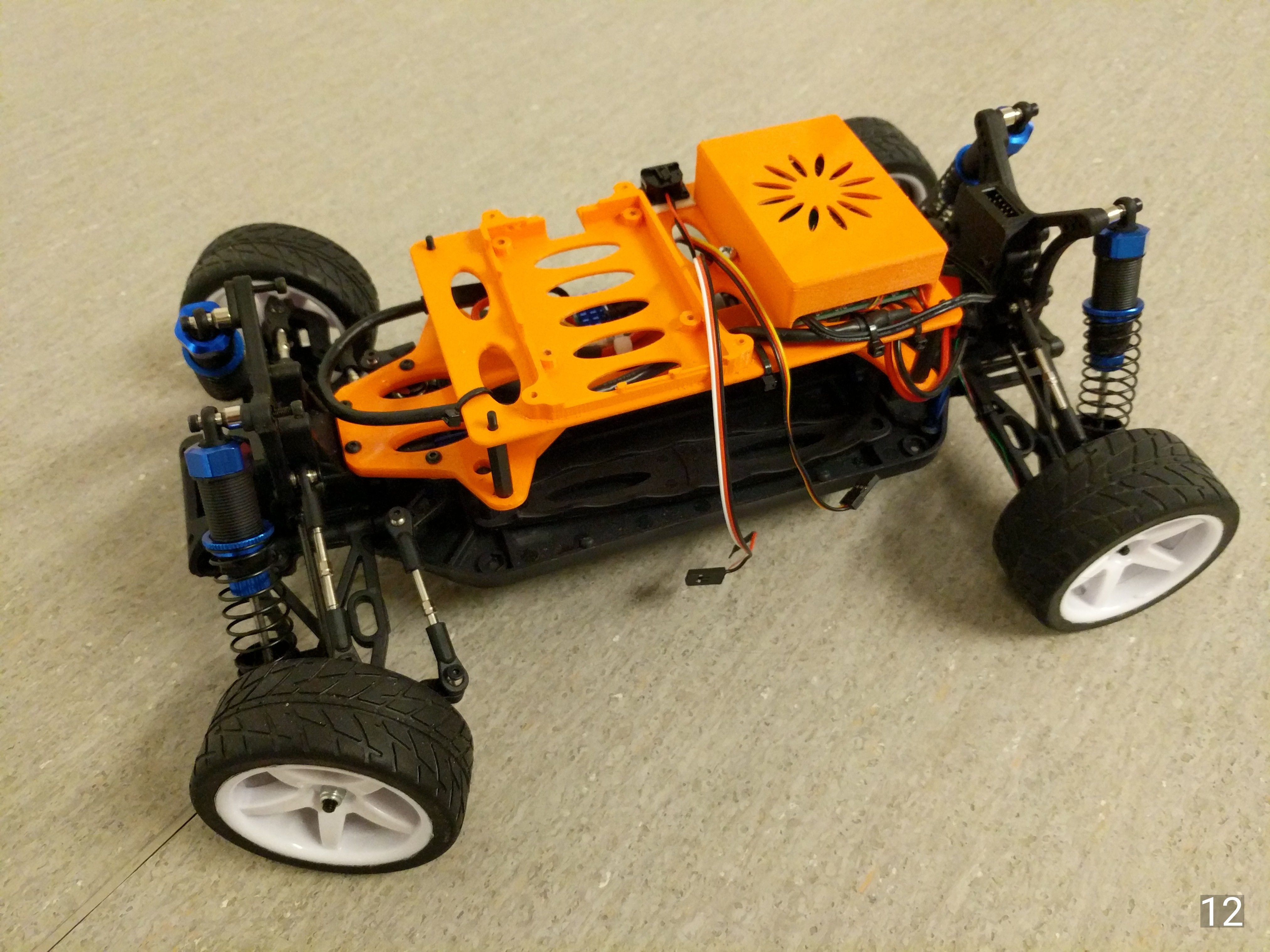
Taxi- och tävlingsbilarna baseras på radiostyrda bilar, där vi har bytt ut elektroniken, som du kommer åt via en 10-polig IDC-kontakt.
Matningsspänning till virkortet kommer via pinne 1-4. Anslut denna till den stående 10p-kontakten på virkortet.
Drivning görs via PWM-signal på pinne 5. Dessutom finns en bromssignal på pinne 7. Styrningen görs via servosignal (se databladet) på pinne 8.
Bilen kan förses med odometer (hjulvarvräknare), i form av tio magneter på bakhjulen, samt en Halleffekt-sensor (känner av magnetism). Dessa mätsignaler kan du då läsa av på pinne 9 och 10.
VARNING: Max hastighet är runt 10 m/s. Det är tillräckligt för att bilen ska skada sig själv, andra saker, eller i värsta fall personer. Det räcker med ett mjukvarufel i er styrmodul för att bilen ska löpa amok.
Datablad.Svävare

Vi har sedan nyligen en helt nyutvecklad svävare, som ersättning för de tidigare quadracoptrarna.
Svävaren styrs av fem ESC:er. En av dem styr de två kraftiga lyft-propellrarna. Fyra stycken styr köra-runt-propellrarna.
Varje ESC kommer med en 3-pin kontakt, med anslutningarna [Gnd, N/A, Signal]. Applicera servo-signaler (se ovan) för att köra (1 ms = av, 2 ms = max). Genom att kombinera olika köra-runt-propellrar kan man både rotera och förflytta svävaren. För att tvärnita så stänger man av lyft-propellrarna.
Svävarna är utrustade med fyra grå reflexbollar, vilka används till positioneringssystemet i Arenan. Genom det kan man få hög precision på svävarens position och rotation.
Tidigare robotar
- Trossenrobotics Quadraped, Getting started, Fyrbeningsrobot.
- Trossenrobotics Hexapod, Getting started, Sexbeningsrobot.
- Carpetrover, Trehjulingsrobot.
- AX12-A, Datablad Dynamixel servo, ingår i Trossenrobotics-robotar
- MX-28T, Datablad Dynamixel servo ingår i WidowX-robotarm
- MX-64T, Datablad Dynamixel servo ingår i WidowX-robotarm
Virkort
-
 VirkortStyrelektroniken byggs på ett eller flera virkort, som bland annat innehåller avkopplingskondensatorer vars uppgift är att motverka störningar på matningsspänningen. Alla komponenter bör därför anslutas direkt till matningsskenorna med korta trådar i stället för att gå i en lång slinga. Den flatkabel som kommer från roboten, och som bland annat innehåller 5 volts matning, bör anslutas till kontakt nummer 1 för att underlätta alternativ 5 volts matning under utvecklingsfasen av ett projektarbete. Den liggande kontakten (nummer 2) bör användas till JTAG (notera att denna har omvänd pinnumrering). De 16-poliga kontakterna (nummer 3-4) kan användas mer fritt så när som på att stift 1-2 alltid är kopplade till jord och 3-4 alltid är kopplade till +5 volt.
VirkortStyrelektroniken byggs på ett eller flera virkort, som bland annat innehåller avkopplingskondensatorer vars uppgift är att motverka störningar på matningsspänningen. Alla komponenter bör därför anslutas direkt till matningsskenorna med korta trådar i stället för att gå i en lång slinga. Den flatkabel som kommer från roboten, och som bland annat innehåller 5 volts matning, bör anslutas till kontakt nummer 1 för att underlätta alternativ 5 volts matning under utvecklingsfasen av ett projektarbete. Den liggande kontakten (nummer 2) bör användas till JTAG (notera att denna har omvänd pinnumrering). De 16-poliga kontakterna (nummer 3-4) kan användas mer fritt så när som på att stift 1-2 alltid är kopplade till jord och 3-4 alltid är kopplade till +5 volt.